|
Research
My research interest lies in building Embodied AI systems with less human supervision and better adaptability in the real world.
Recently, my work has focused on data-centric robot learning: understanding how demonstration geometry shapes imitation learning and how agent-native data lifecycle governance supports reliable robot policy iteration.
|
|
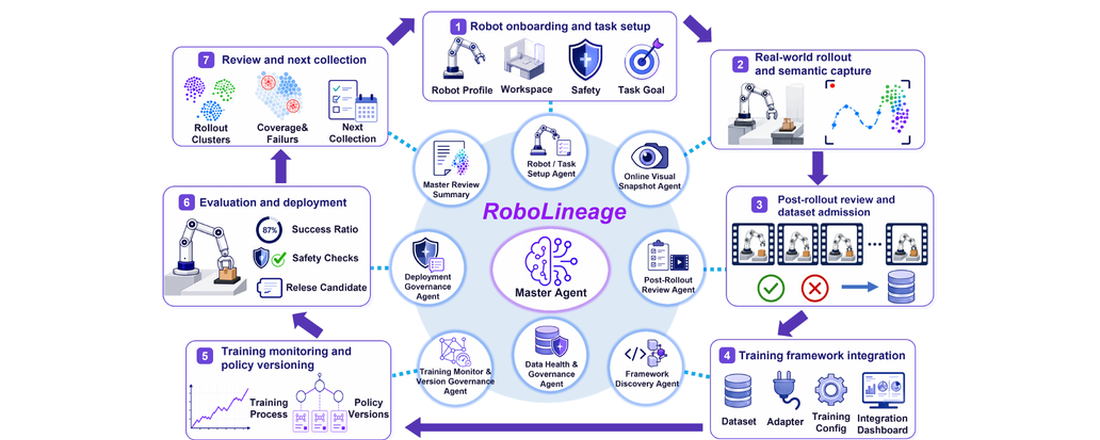
RoboLineage: Agent-Native Data Lifecycle Governance Across Robot Policy Iterations
Qian Luo, Wentao Guo, Zhennan Qin, Nanchun Guo, Yunhan Zhao, Yi Ma, Yanchao Yang
arXiv, 2026
|
|
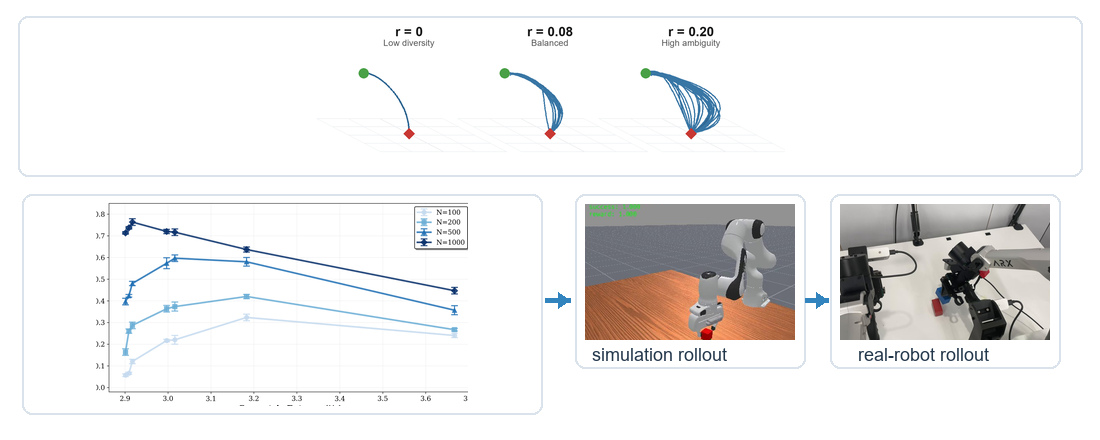
Geometric Entropy: When Trajectory Diversity Helps and Hurts in Imitation Learning
Qian Luo, Ruizhe Liu, Pei Zhou, Xunzhe Zhou, Yanchao Yang
IROS, 2026
|
|
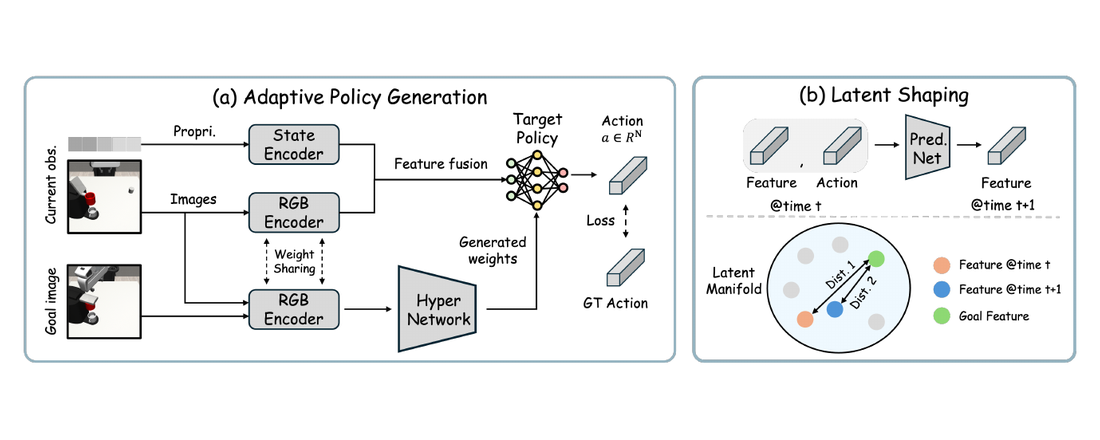
Hyper-GoalNet: Goal-Conditioned Manipulation Policy Learning with HyperNetworks
Pei Zhou, Wanting Yao, Qian Luo, Xunzhe Zhou, Yanchao Yang
NeurIPS, 2025
|
|
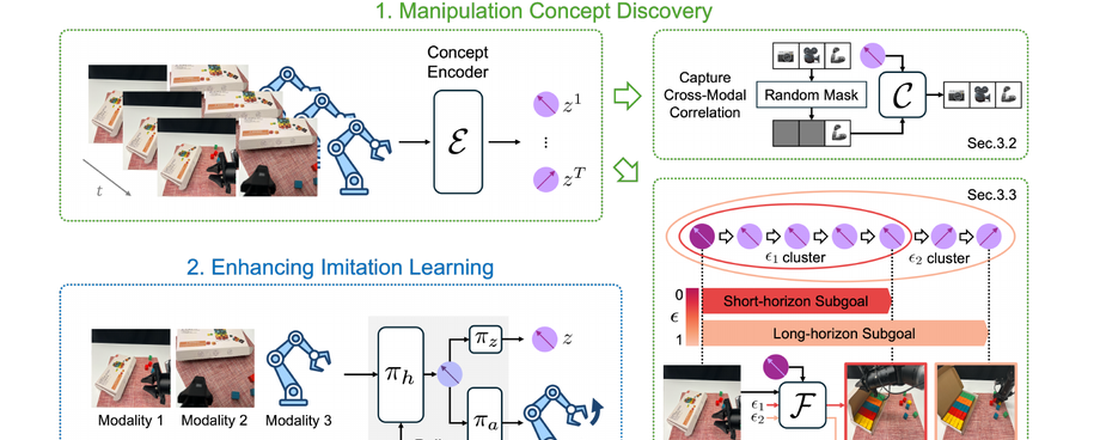
HiMaCon: Discovering Hierarchical Manipulation Concepts from Unlabeled Multi-Modal Data
Ruizhe Liu, Pei Zhou, Qian Luo, Li Sun, Jun Cen, Yibing Song, Yanchao Yang
NeurIPS, 2025
|
|
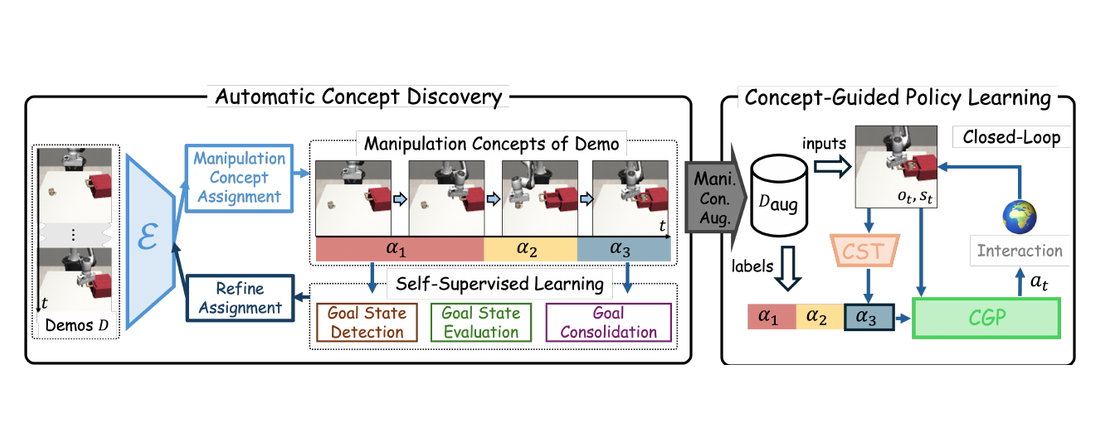
AutoCGP: Closed-Loop Concept-Guided Policies from Unlabeled Demonstrations
Pei Zhou*, Ruizhe Liu*, Qian Luo*, Fan Wang, Yibing Song, Yanchao Yang
ICLR, 2025 (Spotlight)
|
|
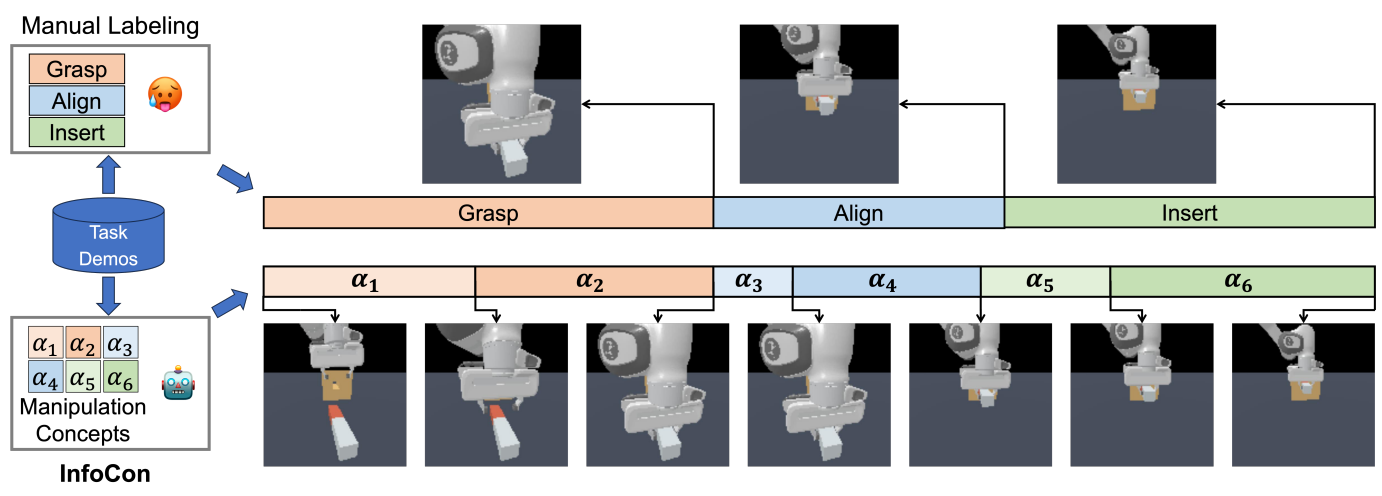
InfoCon: Concept Discovery with Generative and Discriminative Informativeness
Ruizhe Liu, Qian Luo, Yanchao Yang
ICLR, 2024
|
|
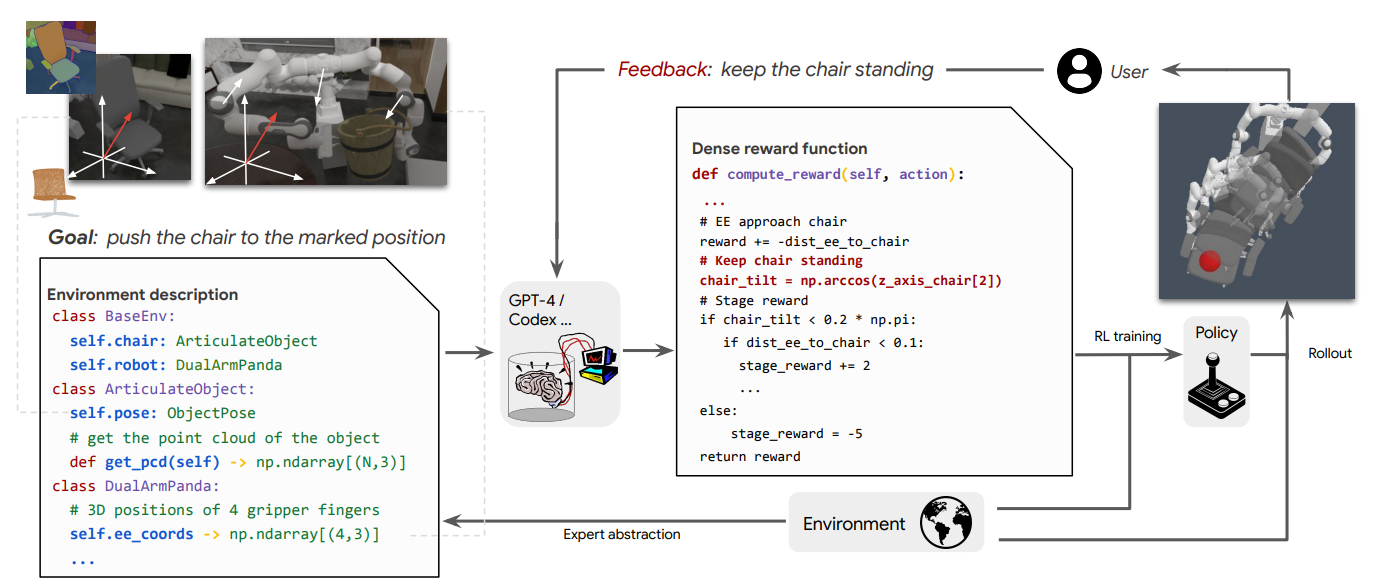
Text2Reward: Automated Dense Reward Function Generation for Reinforcement Learning
Tianbao Xie*, Siheng Zhao*, Chen Henry Wu, Yitao Liu*, Qian Luo, Victor Zhong, Yanchao Yang, Tao Yu
ICLR, 2024 (Spotlight)
|
|
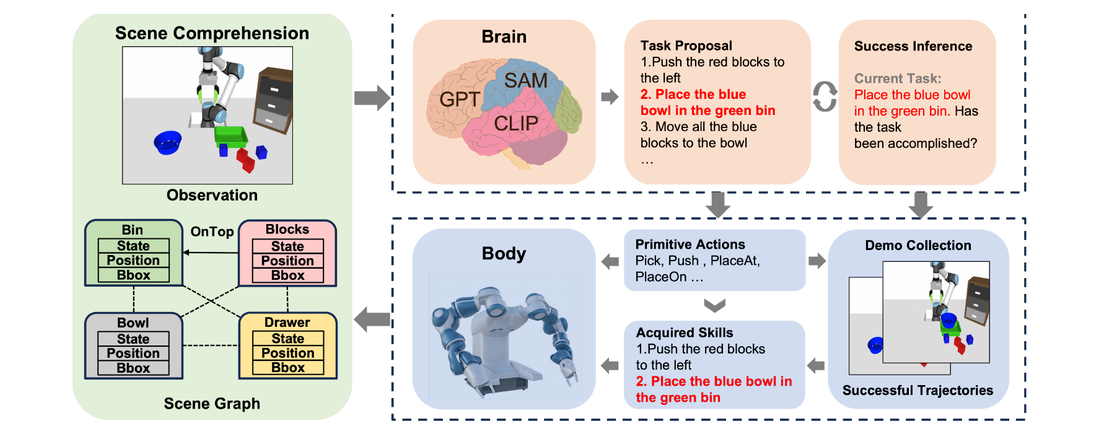
BBSEA: An Exploration of Brain-Body Synchronization for Embodied Agents
Sizhe Yang*, Qian Luo*, Anumpam Pani, Yanchao Yang
arXiv, 2024
|
|
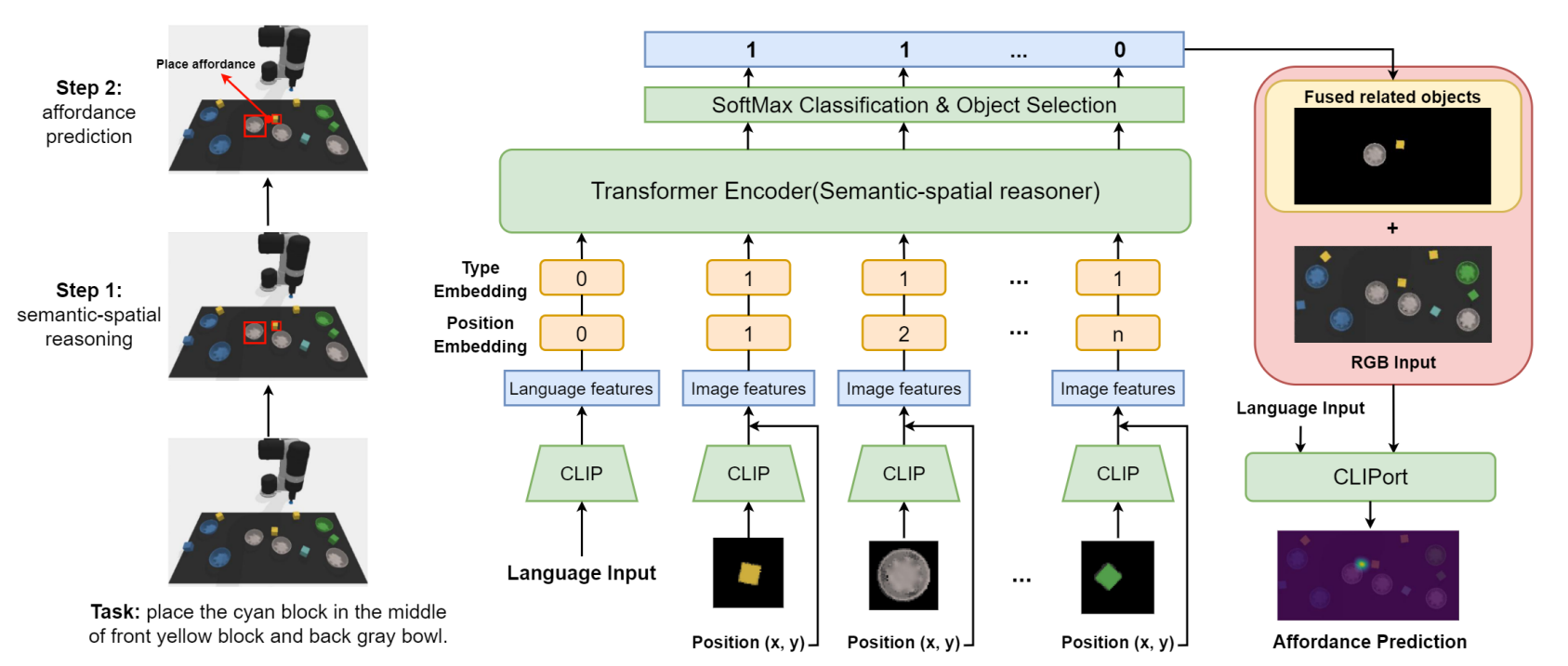
Grounding Object Relations in Language-Conditioned Robotic Manipulation with Semantic-Spatial Reasoning
Qian Luo*, Yunfei Li*, Yi Wu
AAAI RL Ready for Prod Workshop, 2023
|
|
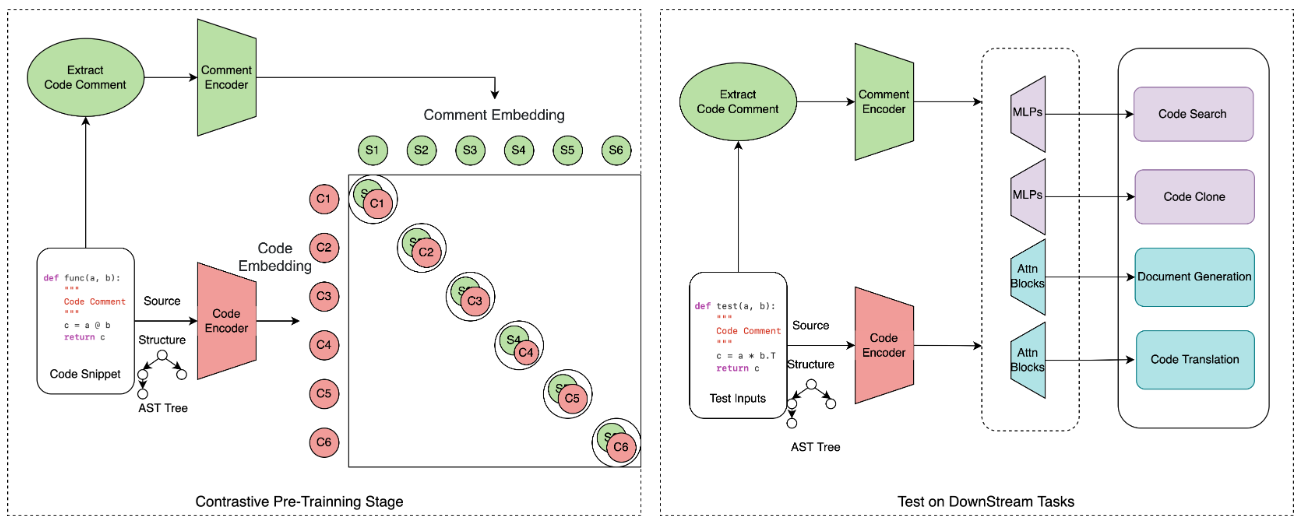
Contrastive Code-Comment Pre-training
Xiaohuan Pei, Daochang Liu, Qian Luo, Chang Xu
ICDM, 2022 (Best Student Paper Award - 1/870)
|
|
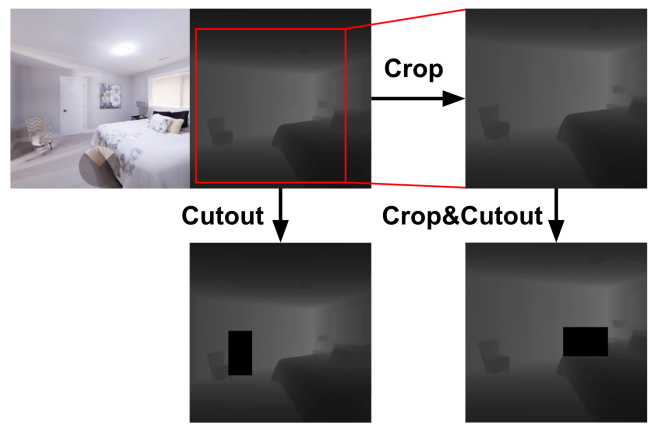
Benchmarking augmentation methods for learning robust navigation agents: the winning entry of the 2021 igibson challenge
Naoki Yokoyama*, Qian Luo*, Dhruv Batra, Sehoon Ha
IROS, 2022
|
|
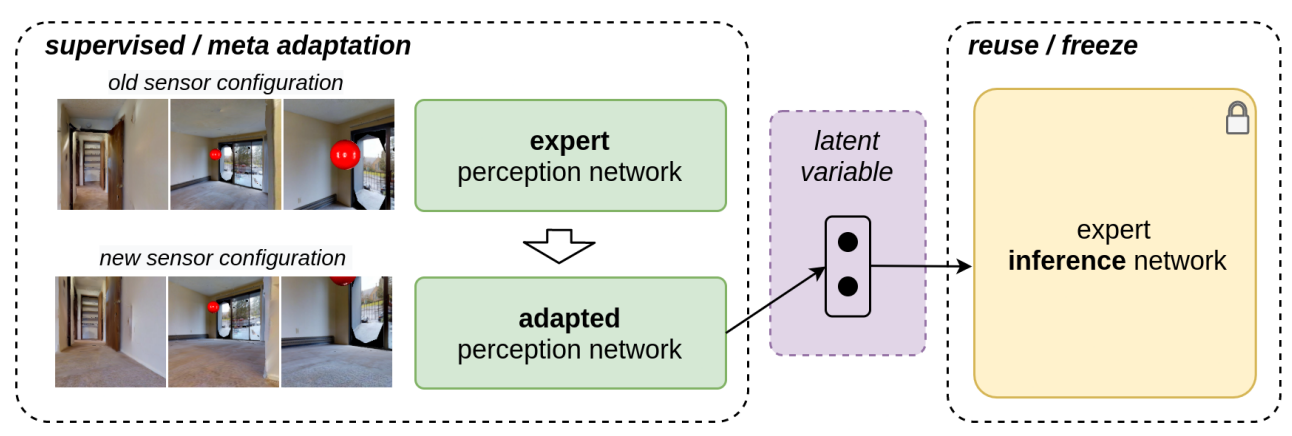
A Few Shot Adaptation of Visual Navigation Skills to New Observations using Meta-Learning
Qian Luo, Maks Sorokin, Sehoon Ha
ICRA, 2021
|
|
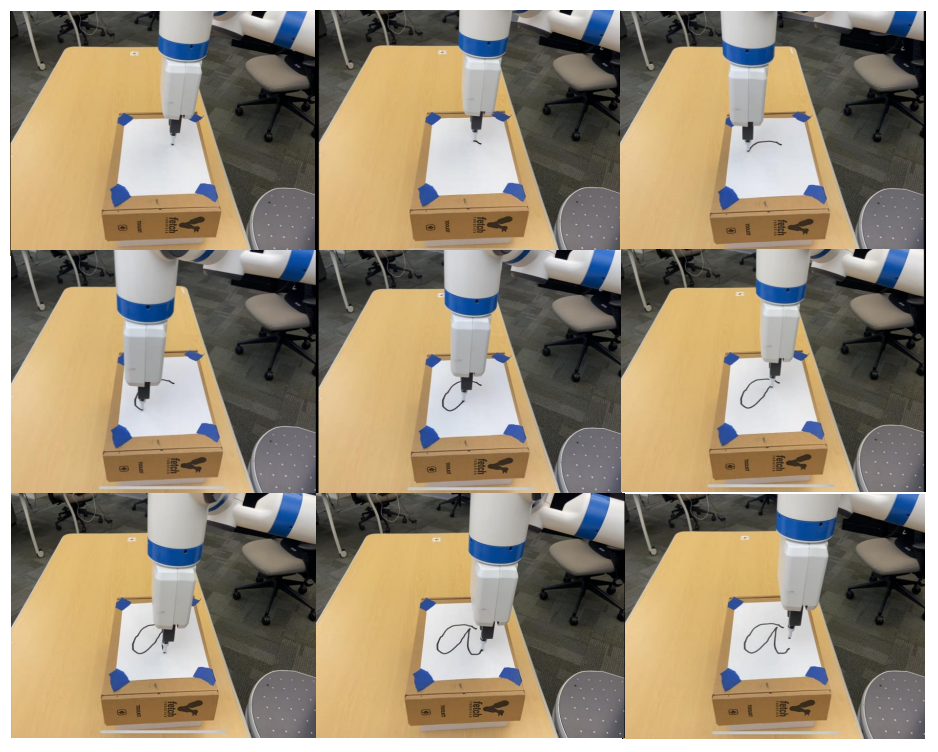
A generalized robotic handwriting learning system based on dynamic movement primitives (DMPs)
Qian Luo*, Jing Wu*, Matthew Gombolay
ArXiv, 2020
|
|
